CIESC Journal ›› 2022, Vol. 73 ›› Issue (4): 1647-1657.DOI: 10.11949/0438-1157.20211473
• Process system engineering • Previous Articles Next Articles
Jiansong WANG( ),Feng XU(),Xionglin LUO
),Feng XU(),Xionglin LUO
Received:2021-10-13
Revised:2021-11-22
Online:2022-04-25
Published:2022-04-05
Contact:
Feng XU
王建松(),许锋(),罗雄麟
通讯作者:
许锋
作者简介:王建松(1997—),男,硕士研究生,基金资助:CLC Number:
Jiansong WANG, Feng XU, Xionglin LUO. Controller parameter self-tuning when control loop mode switching for multi-loop PID control system of chemical process[J]. CIESC Journal, 2022, 73(4): 1647-1657.
王建松, 许锋, 罗雄麟. 化工过程多回路PID控制系统模式切换参数自整定[J]. 化工学报, 2022, 73(4): 1647-1657.
Add to citation manager EndNote|Ris|BibTeX
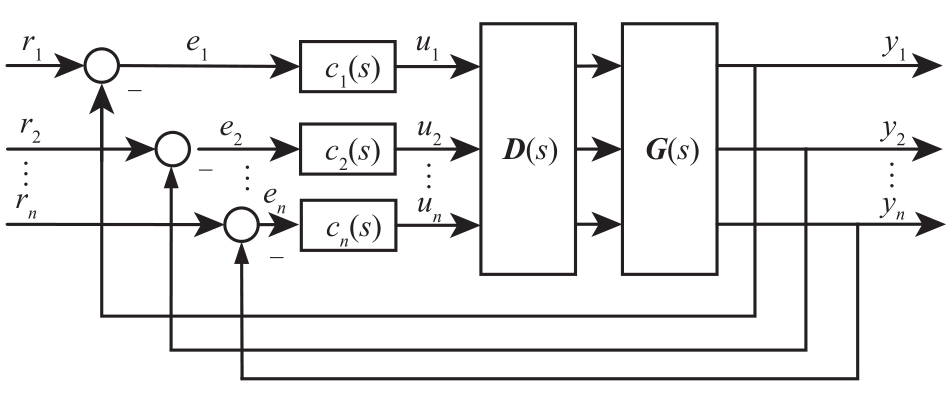
Fig.1 Multivariable decoupling control

Fig.2 Multivariate decentralized control
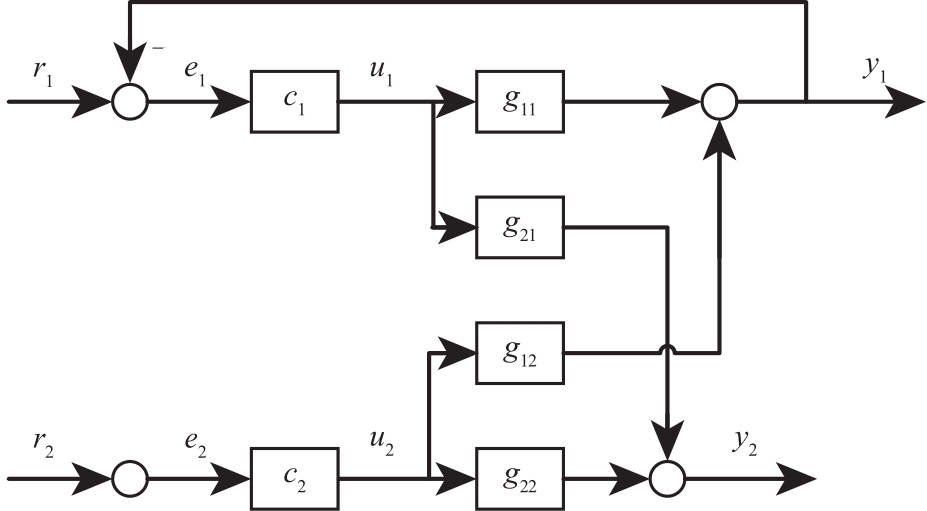
Fig.3 Block diagram of the system structure when only the first control loop is closed
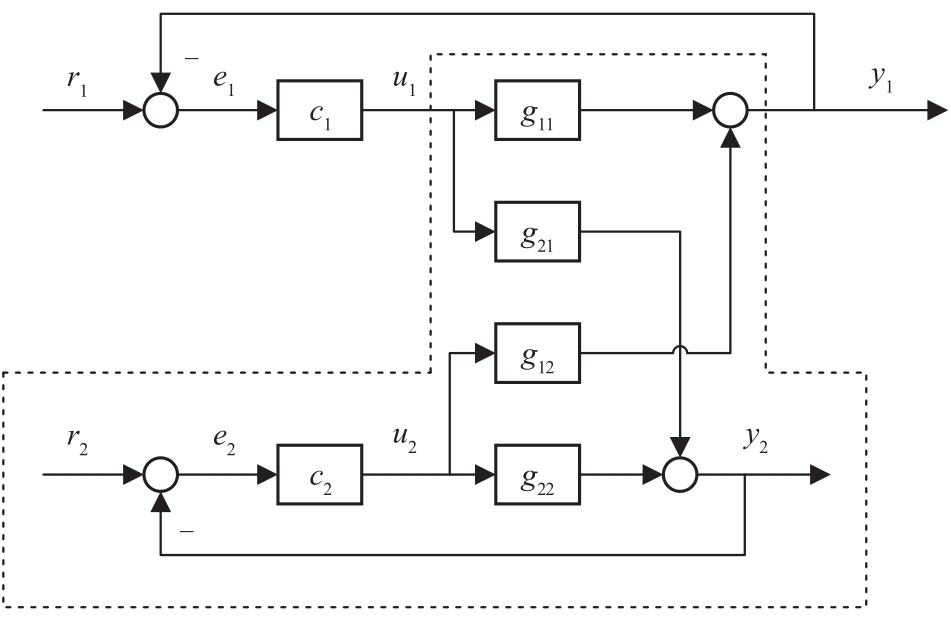
Fig.4 Block diagram of system structure when the second control loop is closed

Fig.5 System control chart
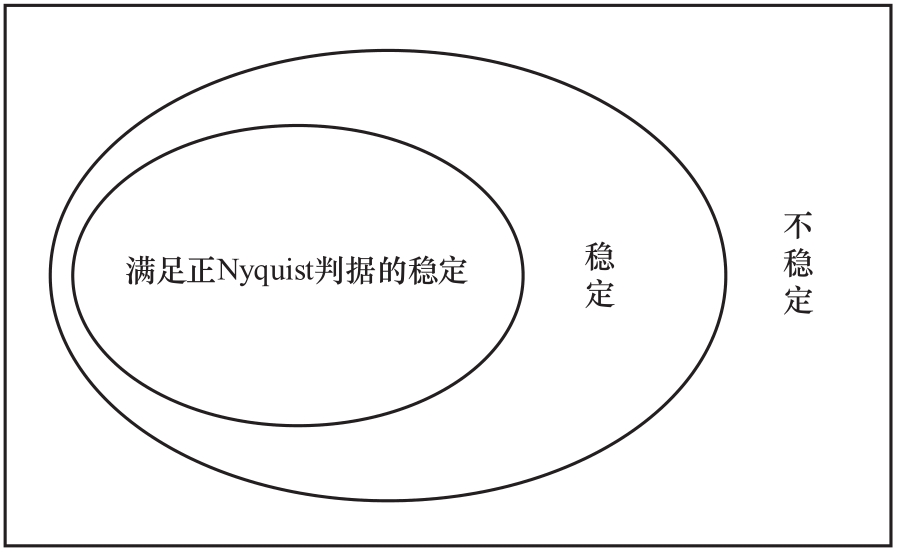
Fig.6 The Venn diagram between direct Nyquist criterion and system stability
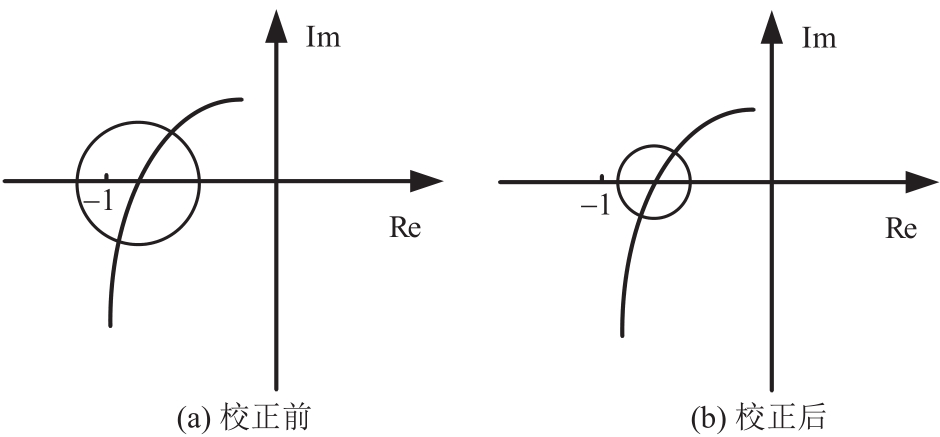
Fig.7 The situation of Gershgorin circle before and after correction

Fig.8 Computer-aided flowchart

Fig.9 Flowchart of heavy oil fractionator

Fig.10 Output curve when control loop u1-y1 is closed
| 控制器参数 | 列Gershgorin圆边界点 | |||
|---|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 | |
| c1=(0.3, 0.01, 0.3) | c1=(0.2037, 0.0068, 0.2037) | h | h | |
| c2=(0.5, 0.03, 0.3) | c2=(0.5, 0.03, 0.3) | h | h | |
Table 1 Control loop u2-y2 mode switching controller parameters and Gershgorin circle before and after correction
| 控制器参数 | 列Gershgorin圆边界点 | |||
|---|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 | |
| c1=(0.3, 0.01, 0.3) | c1=(0.2037, 0.0068, 0.2037) | h | h | |
| c2=(0.5, 0.03, 0.3) | c2=(0.5, 0.03, 0.3) | h | h | |
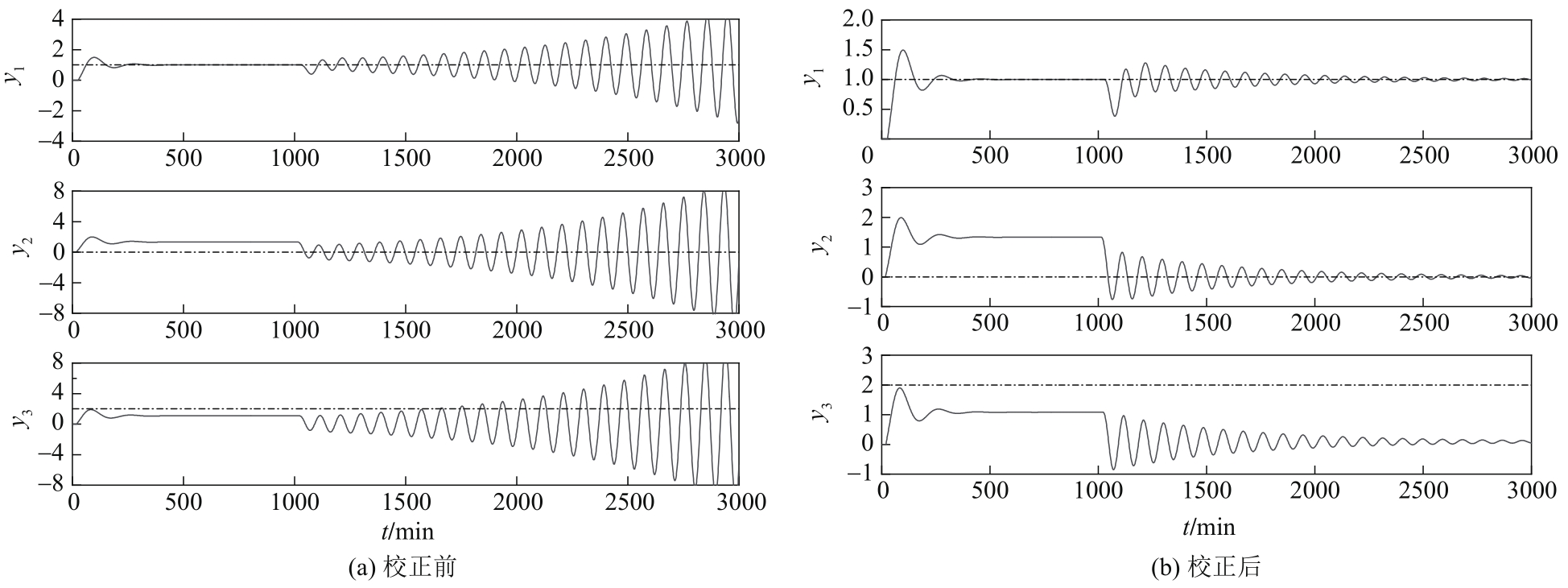
Fig.11 Output curve before and after correction when control loop u2-y2 is closed
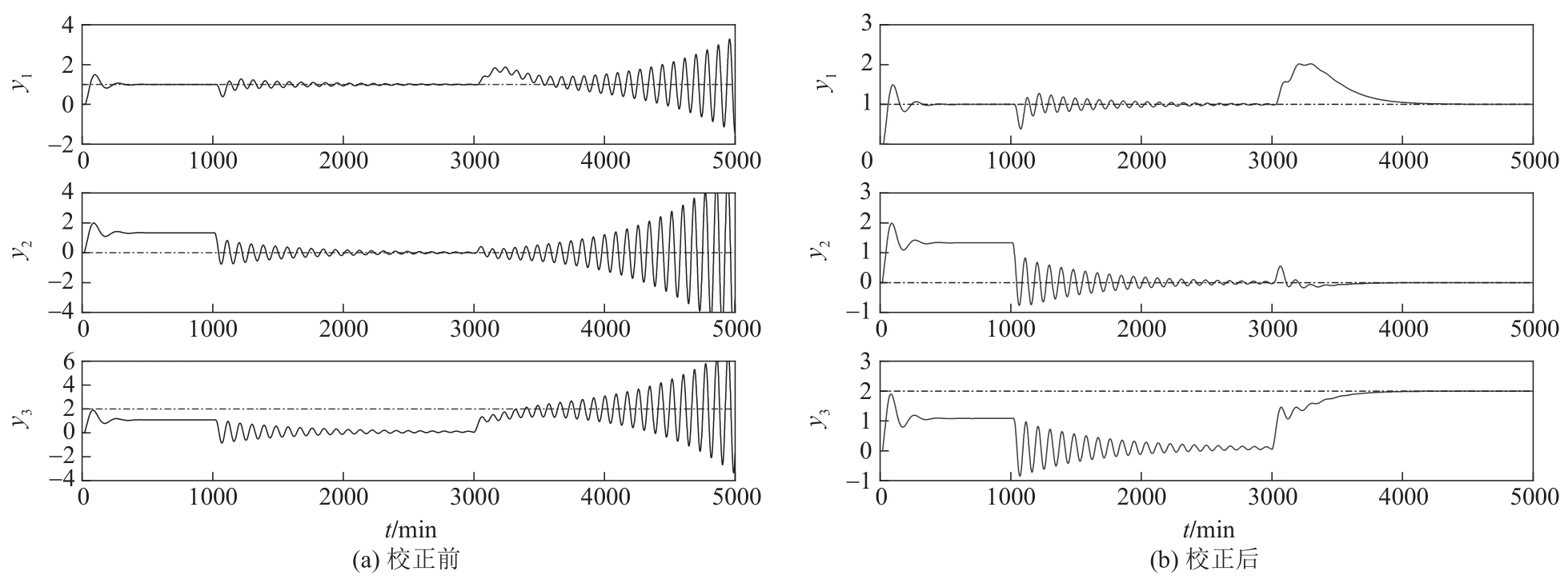
Fig.12 Output curve before and after correction when control loop u3-y3 is closed
| 控制器参数 | 列Gershgorin圆边界点 | |||
|---|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 | |
| c1=(0.2037, 0.0068, 0.2037) | c1=(0.1234, 0.0041, 0.1234) | h | h | |
| c2=(0.5, 0.03, 0.3) | c2=(0.2570, 0.0154, 0.1542) | h | h | |
| c3=(0.05, 0.004, 0.3) | c3=(0.05, 0.004, 0.3) | h | h | |
Table 2 Control loop u3-y3 mode switching controller parameters and Gershgorin circle before and after correction
| 控制器参数 | 列Gershgorin圆边界点 | |||
|---|---|---|---|---|
| 校正前 | 校正后 | 校正前 | 校正后 | |
| c1=(0.2037, 0.0068, 0.2037) | c1=(0.1234, 0.0041, 0.1234) | h | h | |
| c2=(0.5, 0.03, 0.3) | c2=(0.2570, 0.0154, 0.1542) | h | h | |
| c3=(0.05, 0.004, 0.3) | c3=(0.05, 0.004, 0.3) | h | h | |
| 1 | Mayne D Q. The design of linear multivariable systems[J]. Automatica, 1973, 9(2): 201-207. |
| 2 | Monica T J, Yu C C, Luyben W L. Improved multiloop single-input/single-output (SISO) controllers for multivariable processes[J]. Industrial & Engineering Chemistry Research, 1988, 27(6): 969-973. |
| 3 | Bao J, Forbes J F, McLellan P J. Robust multiloop PID controller design: a successive semidefinite programming approach[J]. Industrial & Engineering Chemistry Research, 1999, 38(9): 3407-3419. |
| 4 | Vu T N L, Lee M. Independent design of multi-loop PI/PID controllers for interacting multivariable processes[J]. Journal of Process Control, 2010, 20(8): 922-933. |
| 5 | Bristol E. On a new measure of interaction for multivariable process control[J]. IEEE Transactions on Automatic Control, 1966, 11(1): 133-134. |
| 6 | Wang S, Munro N. A complete proof of Bristol’s relative gain array[J]. Transactions of the Institute of Measurement & Control, 1982, 4(1): 53-56. |
| 7 | Niederlinski A. A heuristic approach to the design of linear multivariable interacting control systems[J]. Automatica, 1971, 7(6): 691-701. |
| 8 | 叶凌箭, 宋执环. 多变量控制系统的一种变量配对方法[J]. 控制与决策, 2009, 24(12): 1795-1800. |
| Ye L J, Song Z H. Variable pairing method for multivariable control systems[J]. Control and Decision, 2009, 24(12): 1795-1800. | |
| 9 | 罗雄麟, 任丽红, 周晓龙, 等. 常规控制系统配对设计的动态相对增益阵研究[J]. 化工自动化及仪表, 2012, 39(3): 295-300. |
| Luo X L, Ren L H, Zhou X L, et al. Dynamic RGA for control system configuration of multivariable process[J]. Control and Instruments in Chemical Industry, 2012, 39(3): 295-300. | |
| 10 | 许锋, 袁未未, 罗雄麟. 化工过程非方瘦系统的串级控制系统结构设计[J]. 化工学报, 2017, 68(7): 2833-2843. |
| Xu F, Yuan W W, Luo X L. Cascade control configuration design for non-square multivariable system of chemical processes[J]. CIESC Journal, 2017, 68(7): 2833-2843. | |
| 11 | 许锋, 袁未未, 罗雄麟. 大系统的常规控制系统结构设计[J]. 计算机与应用化学, 2017, 34(9): 661-668. |
| Xu F, Yuan W W, Luo X L. Regulatory control configuration design for large-scale systems[J]. Computers and Applied Chemistry, 2017, 34(9): 661-668. | |
| 12 | Mc Avoy T, Arkun Y, Chen R, et al. A new approach to defining a dynamic relative gain[J]. Control Engineering Practice, 2003, 11(8): 907-914. |
| 13 | Xu F, Cao P F, Luo X L. Regulator configuration design by means of model predictive control[J]. Journal of Process Control, 2015, 28: 95-103. |
| 14 | Xiong Q, Cai W J, He M J. A practical loop pairing criterion for multivariable processes[J]. Journal of Process Control, 2005, 15(7): 741-747. |
| 15 | Xiong Q, Cai W J, He M J, et al. Decentralized control system design for multivariable processes a novel method based on effective relative gain array[J]. Industrial & Engineering Chemistry Research, 2006, 45(8): 2769-2776. |
| 16 | He M J, Cai W J, Ni W, et al. RNGA based control system configuration for multivariable processes[J]. Journal of Process Control, 2009, 19(6): 1036-1042. |
| 17 | 任丽红, 刘雨波, 罗雄麟, 等. 多变量时滞系统的关联分析与变量配对[J]. 化工自动化及仪表, 2012, 39(6): 743-746, 760. |
| Ren L H, Liu Y B, Luo X L, et al. Association analysis and variable pairing for multivariable system with time delays[J]. Control and Instruments in Chemical Industry, 2012, 39(6): 743-746, 760. | |
| 18 | Lee J, Cho W, Edgar T F. Multiloop PI controller tuning for interacting multivariable processes[J]. Computers & Chemical Engineering, 1998, 22(11): 1711-1723. |
| 19 | Wang Q G, Hang C C, Zou B. A frequency response approach to autotuning of multivariable controllers[J]. Chemical Engineering Research and Design, 1997, 75(8): 797-806. |
| 20 | Kolotilina L Y. On determinantal diagonal dominance conditions[J]. Journal of Mathematical Sciences, 2011, 176(1): 57-67. |
| 21 | Rosenbrock H H. Design of multivariable control systems using the inverse Nyquist array[J]. Proceedings of the Institution of Electrical Engineers, 1969, 116(11): 1929-1936. |
| 22 | Rosenbrock H H, Owens D H. Computer aided control system design[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1976, 6(11): 794. |
| 23 | Rosenbrock H H. Progress in the design of multivariable control systems[J]. Measurement and Control, 1971, 4(1): 9-11. |
| 24 | McMorran P D. Extension of the inverse Nyquist method[J]. Electronics Letters, 1970, 6(25): 800-801. |
| 25 | McMorran P D. Design of gas-turbine controller using inverse Nyquist method[J]. Proceedings of the Institution of Electrical Engineers, 1970, 117(10): 2050. |
| 26 | Ho W K, Lee T H, Xu W, et al. The direct Nyquist array design of PID controllers[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1): 175-185. |
| 27 | Chen D, Seborg D E. Design of decentralized PI control systems based on Nyquist stability analysis[J]. Journal of Process Control, 2003, 13(1): 27-39. |
| 28 | Chen D, Seborg D E. Multiloop PI/PID controller design based on Gershgorin bands[J]. IEE Proceedings-Control Theory and Applications, 2002, 149(1): 68-73. |
| 29 | Luyben W L. Simple method for tuning SISO controllers in multivariable systems[J]. Industrial & Engineering Chemistry Process Design and Development, 1986, 25(3): 654-660. |
| 30 | Ho W K, Lee T H, Gan O P. Tuning of multiloop proportional-integral-derivative controllers based on gain and phase margin specifications[J]. Industrial & Engineering Chemistry Research, 1997, 36(6): 2231-2238. |
| 31 | Lee J, Kim D H, Edgar T F. Static decouplers for control of multivariable processes[J]. AIChE Journal, 2005, 51(10): 2712-2720. |
| 32 | He M J, Cai W J, Wu B F, et al. Simple decentralized PID controller design method based on dynamic relative interaction analysis[J]. Industrial & Engineering Chemistry Research, 2005, 44(22): 8334-8344. |
| 33 | Garelli F, Mantz R J, De Battista H. Limiting interactions in decentralized control of MIMO systems[J]. Journal of Process Control, 2006, 16(5): 473-483. |
| 34 | Carrier J F, Stephanopoulos G. Wavelet-based modulation in control-relevant process identification[J]. AIChE Journal, 1998, 44(2):341-360. |
| 35 | Van Den Hof P M J, Schrama R J P. Identification and control—closed-loop issues[J]. Automatica, 1995, 31(12): 1751-1770. |
| 36 | Prett D M, Garcia C E. Fundamental Process Control [M]. Boston: Butterworths-Heinemann, 1988. |
| [1] | Fei KANG, Weiguang LYU, Feng JU, Zhi SUN. Research on discharge path and evaluation of spent lithium-ion batteries [J]. CIESC Journal, 2023, 74(9): 3903-3911. |
| [2] | Yue CAO, Chong YU, Zhi LI, Minglei YANG. Industrial data driven transition state detection with multi-mode switching of a hydrocracking unit [J]. CIESC Journal, 2023, 74(9): 3841-3854. |
| [3] | Xiaodan SU, Ganyu ZHU, Huiquan LI, Guangming ZHENG, Ziheng MENG, Fang LI, Yunrui YANG, Benjun XI, Yu CUI. Optimization of wet process phosphoric acid hemihydrate process and crystallization of gypsum [J]. CIESC Journal, 2023, 74(4): 1805-1817. |
| [4] | Zhongqiu ZHANG, Hongguang LI, Yilin SHI. A multi-task learning approach for complex chemical processes based on manual predictive manipulating strategies [J]. CIESC Journal, 2023, 74(3): 1195-1204. |
| [5] | Jianghuai ZHANG, Zhong ZHAO. Robust minimum covariance constrained control for C3 hydrogenation process and application [J]. CIESC Journal, 2023, 74(3): 1216-1227. |
| [6] | Weiyi SU, Jiahui DING, Chunli LI, Honghai WANG, Yanjun JIANG. Research progress of enzymatic reactive crystallization [J]. CIESC Journal, 2023, 74(2): 617-629. |
| [7] | Le ZHOU, Chengkai SHEN, Chao WU, Beiping HOU, Zhihuan SONG. Deep fusion feature extraction network and its application in chemical process soft sensing [J]. CIESC Journal, 2022, 73(7): 3156-3165. |
| [8] | Kun WANG, Hongbo SHI, Shuai TAN, Bing SONG, Yang TAO. Local time difference constrained neighborhood preserving embedding algorithm for fault detection [J]. CIESC Journal, 2022, 73(7): 3109-3119. |
| [9] | Taoyan ZHAO, Jiangtao CAO, Ping LI, Lin FENG, Yu SHANG. Application of interval type-2 fuzzy immune PID controller to temperature control system for uncatalysed oxidation of cyclohexane [J]. CIESC Journal, 2022, 73(7): 3166-3173. |
| [10] | Xingshuo ZHANG, Xionglin LUO, Feng XU. Simulation closer to commercial process and prior process analysis based control loop configuration of FCCU reactor-regenerator system [J]. CIESC Journal, 2022, 73(2): 747-758. |
| [11] | Cheng ZHANG, Lizhi PAN, Yuan LI. Fault detection and diagnosis method based on weighted statistical feature KICA [J]. CIESC Journal, 2022, 73(2): 827-837. |
| [12] | Daoming LU, Zhaoting TANG, Yiping FAN, Chunxi LU. Performance of large-difference-particle air classifier [J]. CIESC Journal, 2021, 72(8): 4184-4195. |
| [13] | LI Mengyang, GAO Ming, ZUO Qirong, ZHANG Lixin, ZHAO Yugang. Visualization investigation of TBAB hydrate formation in droplets on supercooled wall surfaces [J]. CIESC Journal, 2021, 72(4): 2094-2101. |
| [14] | LI Yuan, YANG Dongsheng, ZHAO Liying, ZHANG Cheng. Fault detection using hierarchical variational Gaussian mixture model and principal polynomial analysis [J]. CIESC Journal, 2021, 72(3): 1616-1626. |
| [15] | XIE Miaomiao, ZHANG Langwen, XIE Wei. Subsystem decomposition of complex nonlinear systems [J]. CIESC Journal, 2021, 72(3): 1557-1566. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||

