化工学报 ›› 2020, Vol. 71 ›› Issue (7): 3201-3212.DOI: 10.11949/0438-1157.20191531
周红标( ),张钰,柏小颖,刘保连,赵环宇
),张钰,柏小颖,刘保连,赵环宇
收稿日期:2019-12-20
修回日期:2020-02-22
出版日期:2020-07-05
发布日期:2020-07-05
通讯作者:
周红标
作者简介:周红标(1980—),男,博士,讲师,基金资助:
Hongbiao ZHOU(),Yu ZHANG,Xiaoying BAI,Baolian LIU,Huanyu ZHAO
Received:2019-12-20
Revised:2020-02-22
Online:2020-07-05
Published:2020-07-05
Contact:
Hongbiao ZHOU
摘要:
针对非线性动态系统的控制问题,提出了一种基于自适应模糊神经网络(adaptive fuzzy neural network, AFNN)的模型预测控制(model predictive control, MPC)方法。首先,在离线建模阶段,AFNN采用规则自分裂技术产生初始模糊规则,采用改进的自适应LM学习算法优化网络参数;然后,在实时控制过程,AFNN根据系统输出和预测输出之间的误差调整网络参数,从而为MPC提供一个精确的预测模型;进一步,AFNN-MPC利用带有自适应学习率的梯度下降寻优算法求解优化问题,在线获取非线性控制量,并将其作用到动态系统实施控制。此外,给出了AFNN-MPC的收敛性和稳定性证明,以保证其在实际工程中的成功应用。最后,利用数值仿真和双CSTR过程进行实验验证。结果表明,AFNN-MPC能够取得优越的控制性能。
中图分类号:
周红标, 张钰, 柏小颖, 刘保连, 赵环宇. 基于自适应模糊神经网络的非线性系统模型预测控制[J]. 化工学报, 2020, 71(7): 3201-3212.
Hongbiao ZHOU, Yu ZHANG, Xiaoying BAI, Baolian LIU, Huanyu ZHAO. Model predictive control of nonlinear system based on adaptive fuzzy neural network[J]. CIESC Journal, 2020, 71(7): 3201-3212.
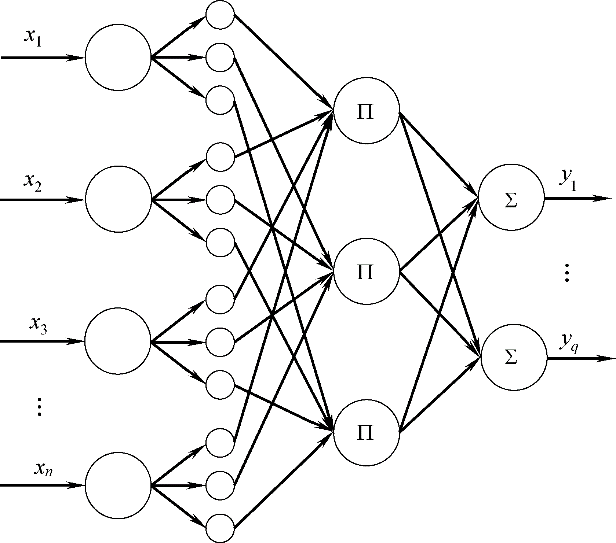
图1 MIMO型FNN的拓扑结构
Fig.1 Architecture of MIMO-type FNN
Algorithm 1: RAS |
|---|
Set the cluster number r = 1 |
Calculate the center of the first cluster v1; |
Calculate the mean variance |
while |
Split the Ith cluster into two new centers; |
r = r + 1; |
while current iteration times t1<T1 & |Jm(t1) - Jm(t1-1)| > εdo |
forj=1:rdo |
Find input training samples for cluster vj ; |
Calculate the center of cluster vj according to Eq. (13); |
end |
t1++; |
end while |
end while |
return r clusters; |
表1 RAS的算法流程
Table 1 Algorithm flow of RAS
Algorithm 1: RAS |
|---|
Set the cluster number r = 1 |
Calculate the center of the first cluster v1; |
Calculate the mean variance |
while |
Split the Ith cluster into two new centers; |
r = r + 1; |
while current iteration times t1<T1 & |Jm(t1) - Jm(t1-1)| > εdo |
forj=1:rdo |
Find input training samples for cluster vj ; |
Calculate the center of cluster vj according to Eq. (13); |
end |
t1++; |
end while |
end while |
return r clusters; |
Algorithm 2: AFNN |
|---|
Set the maximum iteration times Tmax; |
Obtain r clusters using RAS algorithm; |
Create an initial four-layer FNN; |
while current iteration times t<Tmax do |
for p=1:Pdo |
Calculate the outputs of FNN yp(t) by Eq.(8); |
Make the error of each sample ep(t) by Eq. (15); |
Make the submatrices ψp(t) by Eq. (21); |
Make the subvectors ωp(t) by Eq. (22); |
end |
Update the adaptive learning rate η(t) by Eq. (18); |
Make the quasi-Hessian matrix Ψ(t) by Eq. (19); |
Make the gradient vector Ω(t) by Eq. (20); |
Update the parameter vector Θ(t) by Eq. (17); |
t++; |
end while |
表2 AFNN的算法流程
Table 2 Algorithm flow of AFNN
Algorithm 2: AFNN |
|---|
Set the maximum iteration times Tmax; |
Obtain r clusters using RAS algorithm; |
Create an initial four-layer FNN; |
while current iteration times t<Tmax do |
for p=1:Pdo |
Calculate the outputs of FNN yp(t) by Eq.(8); |
Make the error of each sample ep(t) by Eq. (15); |
Make the submatrices ψp(t) by Eq. (21); |
Make the subvectors ωp(t) by Eq. (22); |
end |
Update the adaptive learning rate η(t) by Eq. (18); |
Make the quasi-Hessian matrix Ψ(t) by Eq. (19); |
Make the gradient vector Ω(t) by Eq. (20); |
Update the parameter vector Θ(t) by Eq. (17); |
t++; |
end while |

图2 AFNN-MPC的控制架构
Fig.2 Control architecture of AFNN-MPC
Algorithm 3: AFNN-MPC |
|---|
Generate offline data using GMN signal; |
Develop AFNN predictive model offline; |
Initialize the parameters of MPC; |
fork←1 to ndo |
Sample the plant output y(k); |
Update the parameters of AFNN by Eq.(24)—Eq.(26); |
Calculate the prediction outputs ?(k+h); |
while current iteration times tc<Tcdo |
Compute the control increment Δuk(tc) by Eq. (39); |
Compute the control signal uk(tc) by Eq. (31); |
tc++; |
end while |
Apply u(k+1) to the controlled process; |
end |
表3 AFNN-MPC算法流程
Table 3 Algorithm flow of AFNN-MPC
Algorithm 3: AFNN-MPC |
|---|
Generate offline data using GMN signal; |
Develop AFNN predictive model offline; |
Initialize the parameters of MPC; |
fork←1 to ndo |
Sample the plant output y(k); |
Update the parameters of AFNN by Eq.(24)—Eq.(26); |
Calculate the prediction outputs ?(k+h); |
while current iteration times tc<Tcdo |
Compute the control increment Δuk(tc) by Eq. (39); |
Compute the control signal uk(tc) by Eq. (31); |
tc++; |
end while |
Apply u(k+1) to the controlled process; |
end |
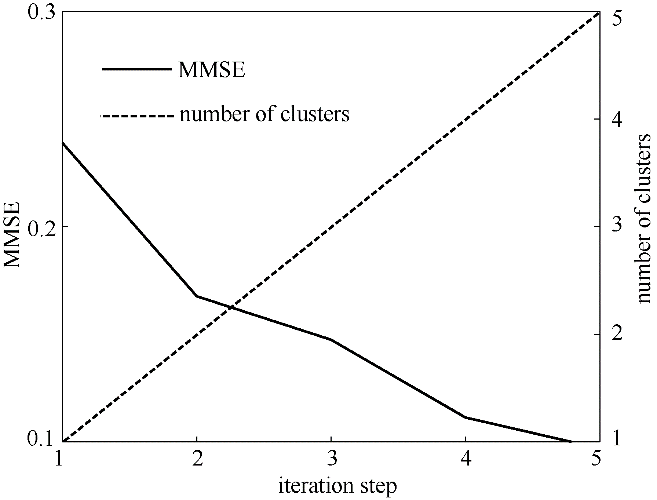
图3 AFNN结构辨识阶段的MMSE曲线
Fig.3 MMSE curve during AFNN structure identification
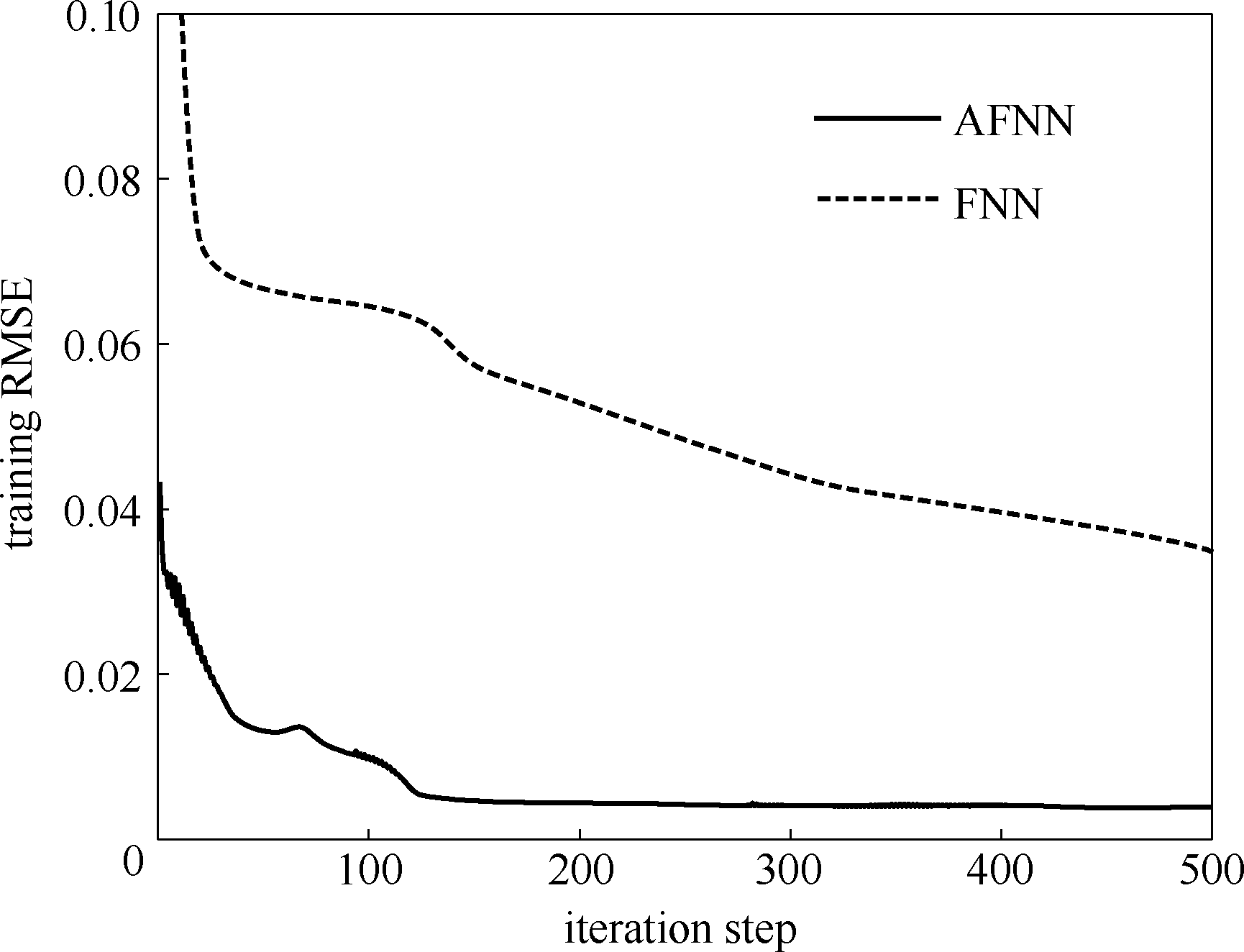
图4 AFNN参数学习阶段的RMSE曲线
Fig.4 RMSE curve during AFNN parameter training
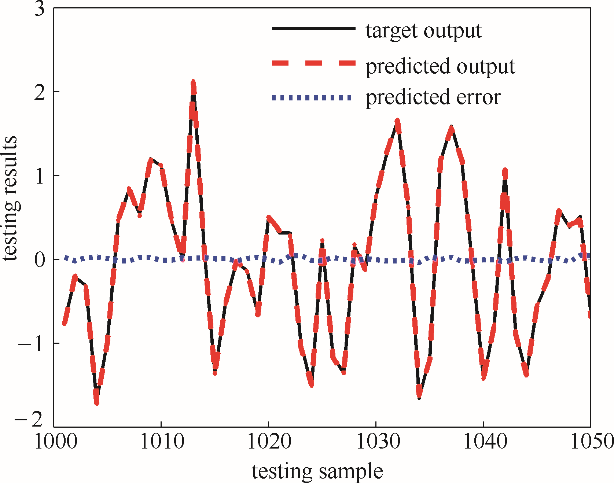
图5 测试样本的预测结果
Fig.5 Prediction results of testing samples
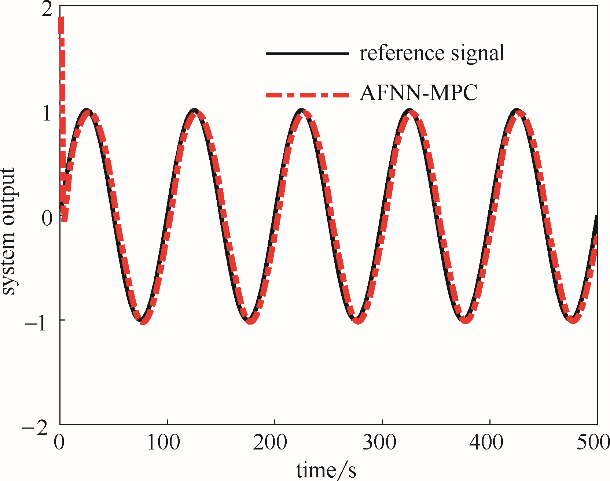
图6 AFNN-MPC的控制效果
Fig.6 Control performance of AFNN-MPC
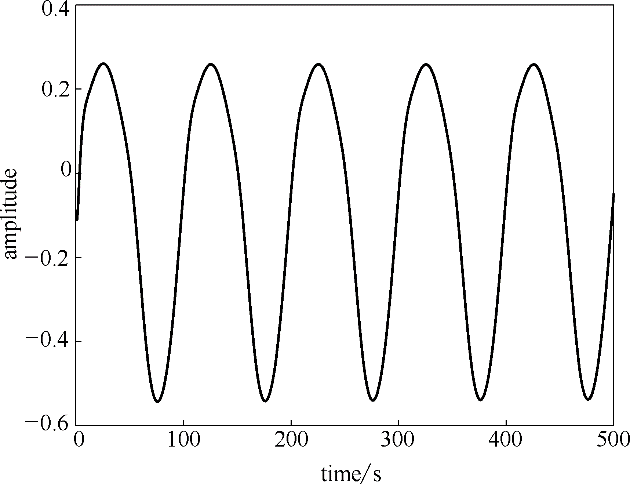
图7 控制信号u的变化情况
Fig.7 Change of the control signal u
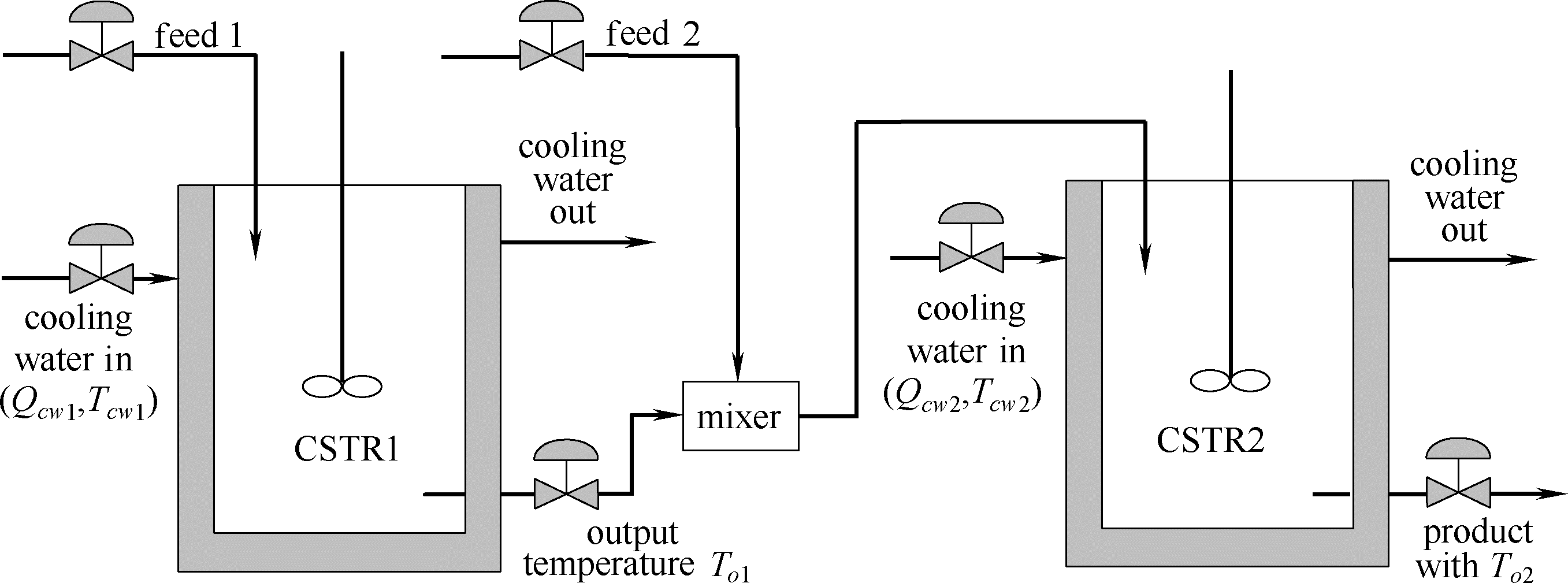
图8 两级CSTR过程的示意图
Fig.8 Schematic of two-CSTR process
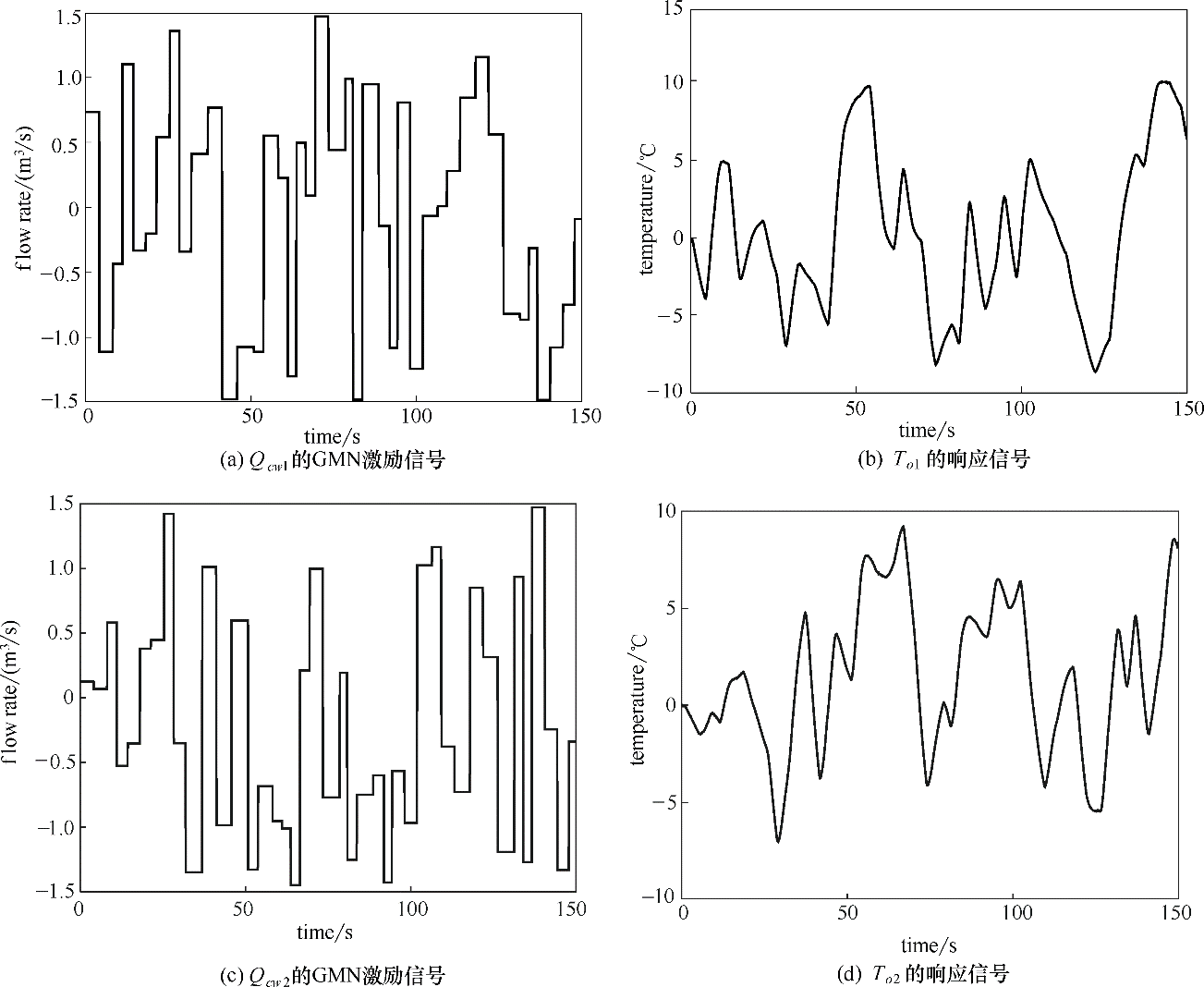
图9 GMN激励信号和CSTR响应信号
Fig.9 GMN excitation signal and CSTR response signal
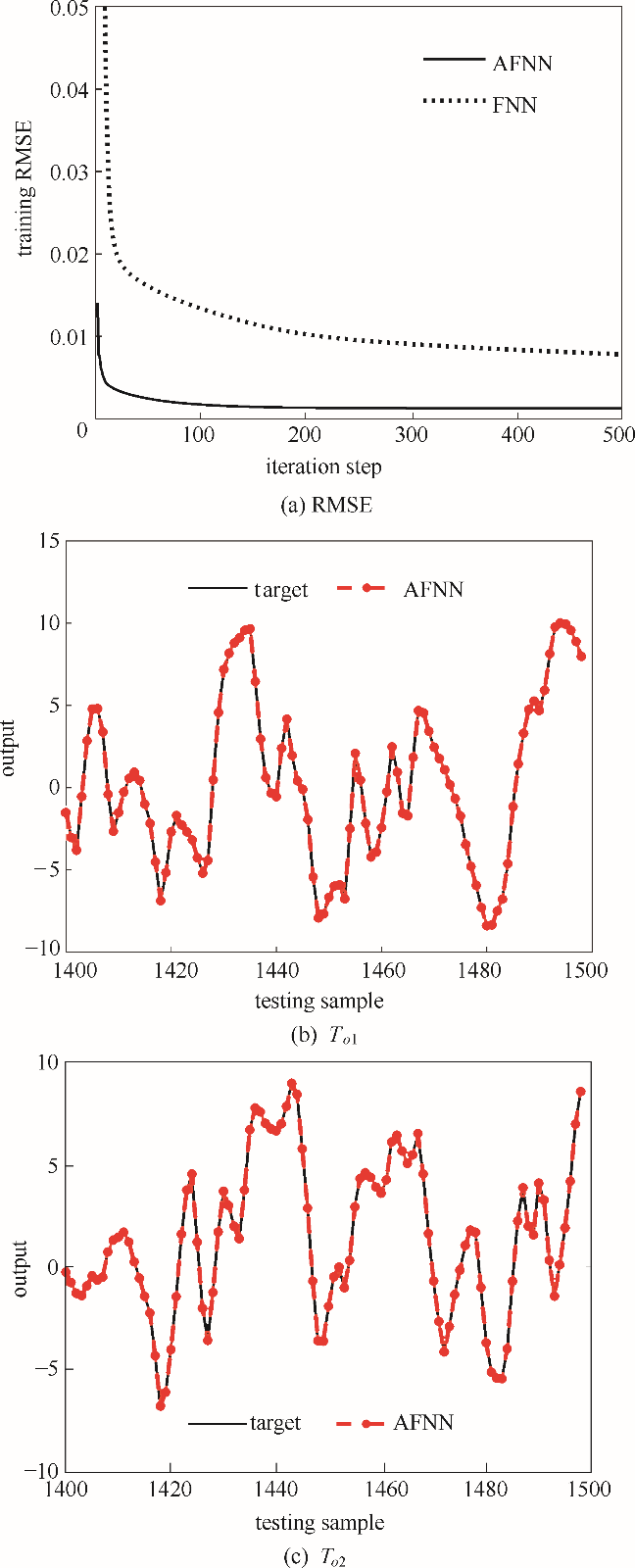
图10 AFNN的RMSE和建模结果
Fig.10 RMSE and modeling results of AFNN
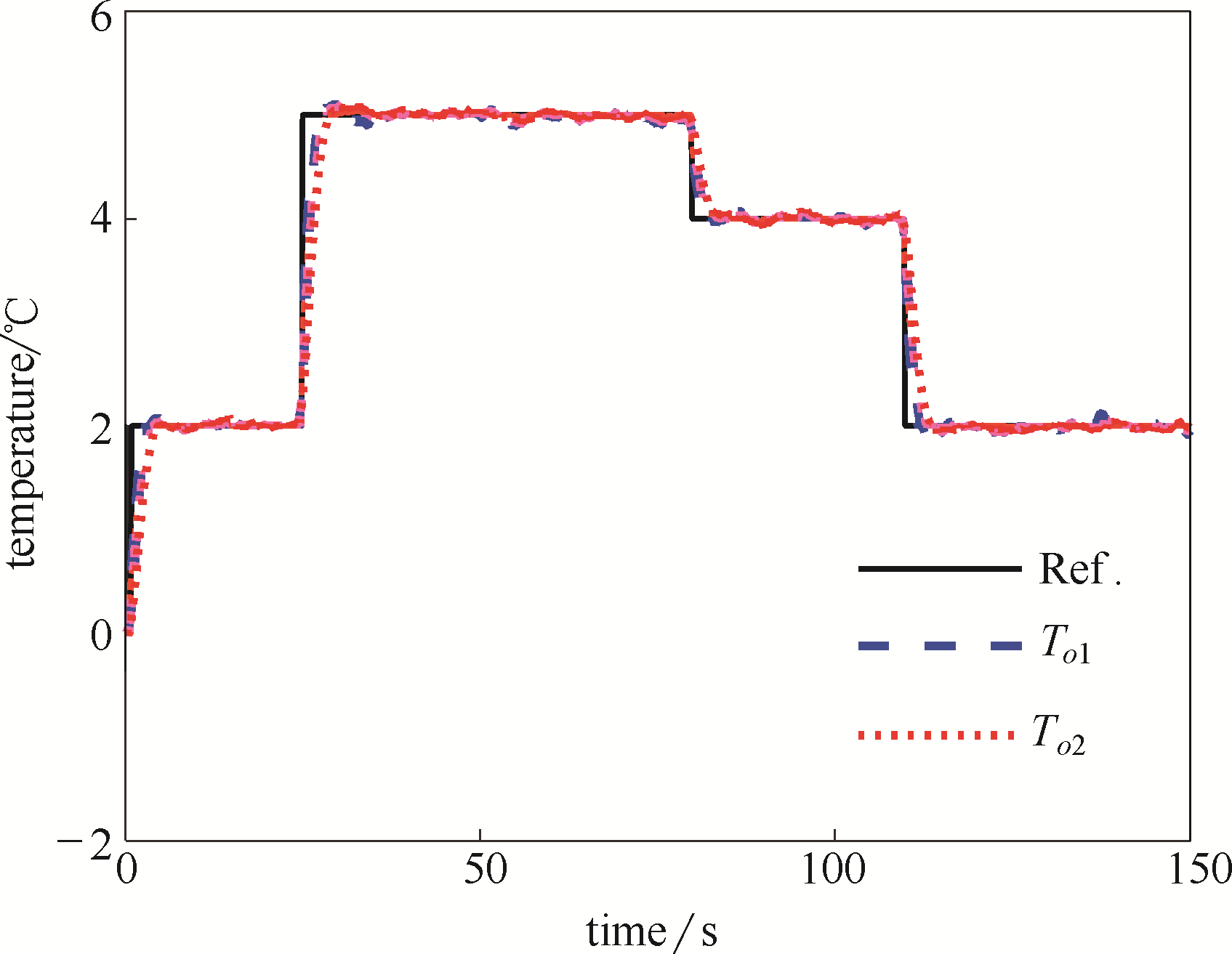
图11 AFNN-MPC的控制结果
Fig.11 Control results of AFNN-MPC
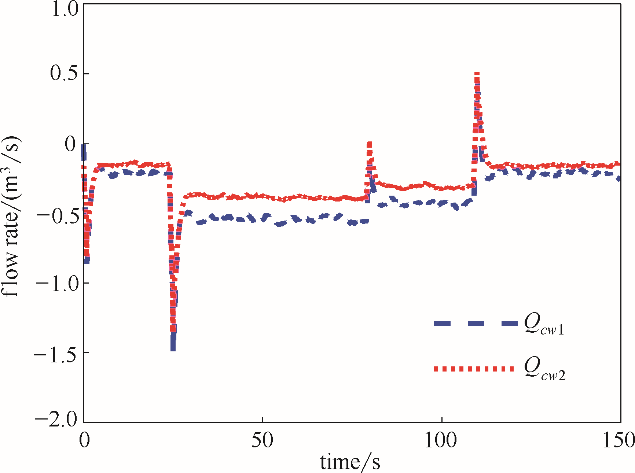
图12 控制信号Qcw1和Qcw2的变化情况
Fig.12 Changes of control signal Qcw1 and Qcw2
| Controller | No. | IAE | ISE | Devmax |
|---|---|---|---|---|
| PID | - | 147.20 | 110.22 | 3.05 |
| FLC | 49 | 139.45 | 102.71 | 2.78 |
| GPC | - | 135.58 | 107.29 | 2.80 |
| FNN-MPC | 20 | 130.48 | 100.43 | 2.66 |
| WFNN-MPC | 20 | 132.66 | 101.10 | 2.68 |
| AFNN-MPC | 14 | 126.00 | 95.31 | 2.59 |
表4 不同算法在To1上的控制结果
Table 4 Control results of different algorithms for To1
| Controller | No. | IAE | ISE | Devmax |
|---|---|---|---|---|
| PID | - | 147.20 | 110.22 | 3.05 |
| FLC | 49 | 139.45 | 102.71 | 2.78 |
| GPC | - | 135.58 | 107.29 | 2.80 |
| FNN-MPC | 20 | 130.48 | 100.43 | 2.66 |
| WFNN-MPC | 20 | 132.66 | 101.10 | 2.68 |
| AFNN-MPC | 14 | 126.00 | 95.31 | 2.59 |
| Controller | No. | IAE | ISE | Devmax |
|---|---|---|---|---|
| PID | - | 180.72 | 170.82 | 3.28 |
| FLC | 49 | 160.04 | 158.90 | 2.99 |
| GPC | - | 175.13 | 156.29 | 3.01 |
| FNN-MPC | 20 | 156.72 | 149.64 | 2.81 |
| WFNN-MPC | 20 | 152.54 | 151.08 | 2.82 |
| AFNN-MPC | 14 | 149.66 | 144.70 | 2.70 |
表5 不同算法在To2上的控制结果
Table 5 Control results of different algorithms for To2
| Controller | No. | IAE | ISE | Devmax |
|---|---|---|---|---|
| PID | - | 180.72 | 170.82 | 3.28 |
| FLC | 49 | 160.04 | 158.90 | 2.99 |
| GPC | - | 175.13 | 156.29 | 3.01 |
| FNN-MPC | 20 | 156.72 | 149.64 | 2.81 |
| WFNN-MPC | 20 | 152.54 | 151.08 | 2.82 |
| AFNN-MPC | 14 | 149.66 | 144.70 | 2.70 |
| 1 | Yin S, Li X, Gao H. Data-based techniques focused on modern industry: an overview[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 657-667. |
| 2 | Forbes M G, Patwardhan R S, Hamadah H. Model predictive control in industry: challenges and opportunities[J]. IFAC-PapersOnLine, 2015, 48(8): 531-538. |
| 3 | Pang Z H, Liu G P, Zhou D. Data-based predictive control for networked nonlinear systems with network-induced delay and packet dropout[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1249-1257. |
| 4 | Qin S J, Badgwell T A. A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003, 11(7): 733-764. |
| 5 | Mulas M, Tronci S, Corona F. Predictive control of an activated sludge process: an application to the Viikinmäki wastewater treatment plant[J]. Journal of Process Control, 2015, 35(11): 89-100. |
| 6 | Vazquez S, Rodriguez J, Rivera M. Model predictive control for power converters and drives: advances and trends[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 935-947. |
| 7 | Wang T, Gao H, Qiu J. A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control[J]. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(2): 416-425. |
| 8 | Klenske E D, Zeilinger M N, Schölkopf B. Gaussian process-based predictive control for periodic error correction[J]. IEEE Transactions on Control Systems Technology, 2016, 24(1): 110-121. |
| 9 | Khooban M H, Vafamand N, Niknam T. Model-predictive control based on Takagi-Sugeno fuzzy model for electrical vehicles delayed model[J]. IET Electric Power Applications, 2017, 11(5): 918-934. |
| 10 | Khooban M H, Vafamand N, Niknam T. T-S fuzzy model predictive speed control of electrical vehicles[J]. ISA Transactions, 2016, 64(9): 231-240. |
| 11 | Muthukumar P, Balasubramaniam P, Ratnavelu K. T–S fuzzy predictive control for fractional order dynamical systems and its applications[J]. Nonlinear Dynamics, 2016, 86(2): 751-763. |
| 12 | Bououden S, Chadli M, Karimi H R. An ant colony optimization-based fuzzy predictive control approach for nonlinear processes[J]. Information Sciences, 2015, 299(4): 143-158. |
| 13 | Zeng G M, Qin X S, He L. A neural network predictive control system for paper mill wastewater treatment[J]. Engineering Applications of Artificial Intelligence, 2003, 16(2): 121-129. |
| 14 | Caraman S, Sbarciog M, Barbu M. Predictive control of a wastewater treatment process[J]. International Journal of Computers Communications & Control, 2007, 2(2): 132-142. |
| 15 | Yu D L, Yu D W, Gomm J B. Neural model adaptation and predictive control of a chemical process rig[J]. IEEE Transactions on Control Systems Technology, 2006, 14(5): 828-840. |
| 16 | Mirzaeinejad H. Robust predictive control of wheel slip in antilock braking systems based on radial basis function neural network[J]. Applied Soft Computing, 2018, 70(9):318-329. |
| 17 | Peng H, Nakano K, Shioya H. Nonlinear predictive control using neural nets-based local linearization ARX model—stability and industrial application[J]. IEEE Transactions on Control Systems Technology, 2007, 15(1): 130-143. |
| 18 | Yan Z, Wang J. Model predictive control of nonlinear systems with unmodeled dynamics based on feedforward and recurrent neural networks[J]. IEEE Transactions on Industrial Informatics, 2012, 8(4): 746-756. |
| 19 | Pan Y, Wang J. Model predictive control of unknown nonlinear dynamical systems based on recurrent neural networks[J]. IEEE Transactions on Industrial Electronics, 2012, 59(8): 3089-3101. |
| 20 | Xu J, Li C, He X. Recurrent neural network for solving model predictive control problem in application of four-tank benchmark[J]. Neurocomputing, 2016, 190(5): 172-178. |
| 21 | Lu C H, Ching C T. Generalized predictive control using recurrent fuzzy neural networks for industrial processes[J]. Journal of Process Control, 2007, 17(1): 83-92. |
| 22 | Lu C H. Wavelet fuzzy neural networks for identification and predictive control of dynamic systems[J]. IEEE Transactions on Industrial Electronics, 2011, 58(7): 3046-3058. |
| 23 | Teng L, Wang Y. Robust fuzzy model predictive control of discrete-time Takagi-Sugeno systems with nonlinear local models[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(5): 2915-2925. |
| 24 | Huang M Z, Ma Y W, Wan J Q. Simulation of a paper mill wastewater treatment using a fuzzy neural network[J]. Expert Systems with Applications, 2009, 36(3): 5064-5070. |
| 25 | Cheng L, Liu W C, Hou Z G, et al. Neural-network-based nonlinear model predictive control for piezoelectric actuators[J]. IEEE Transactions on Industrial Electronics, 2015, 62(12): 7717-7727. |
| 26 | Tian Z D, Li S J, Wang Y H. TS fuzzy neural network predictive control for burning zone temperature in rotary kiln with improved hierarchical genetic algorithm[J]. International Journal of Modelling, Identification and Control, 2016, 25(4): 323-334. |
| 27 | Li J S, Xiong Q Y, Wang K, et al. A recurrent self-evolving fuzzy neural network predictive control for microwave drying process[J]. Drying Technology, 2016, 34(12): 1434-1444. |
| 28 | Qiao J F, Zhou H B. Modeling of energy consumption and effluent quality using density peaks-based adaptive fuzzy neural network[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(5): 968-976. |
| 29 | Zhou H B, Qiao J F. Soft sensing of effluent ammonia nitrogen using rule automatic formation-based adaptive fuzzy neural network[J]. Desalination and Water Treatment, 2019, 140(2): 132-142. |
| 30 | 周红标. 基于自组织模糊神经网络的污水处理过程溶解氧控制[J]. 化工学报, 2017, 68(4): 1516-1524. |
| Zhou H B. Dissolved oxygen control of the wastewater treatment process using self-organizing fuzzy neural network[J]. CIESC Journal, 2017, 68(4): 1516-1524. | |
| 31 | 乔俊飞, 周红标. 基于自组织模糊神经网络的出水总磷预测[J]. 控制理论与应用, 2017, 34(2): 224-232. |
| Qiao J F, Zhou H B. Prediction of effluent total phosphorus based on self-organizing fuzzy neural network[J]. Control Theory and Applications, 2017, 34(2): 224-232. | |
| 32 | Du J, Johansen T A. Control-relevant nonlinearity measure and integrated multi-model control[J]. Journal of Process Control, 2017, 57(9): 127-139. |
| 33 | Cao Y, Yang Z. Multiobjective process controllability analysis[J]. Computers & Chemical Engineering, 2004, 28(1/2): 83-90. |
| 34 | Al Seyab R K, Cao Y. Differential recurrent neural network based predictive control[J]. Computers & Chemical Engineering, 2008, 32(7): 1533-1545. |
| [1] | 曹跃, 余冲, 李智, 杨明磊. 工业数据驱动的加氢裂化装置多工况切换过渡状态检测[J]. 化工学报, 2023, 74(9): 3841-3854. |
| [2] | 康飞, 吕伟光, 巨锋, 孙峙. 废锂离子电池放电路径与评价研究[J]. 化工学报, 2023, 74(9): 3903-3911. |
| [3] | 邵伟明, 韩文学, 宋伟, 杨勇, 陈灿, 赵东亚. 基于分布式贝叶斯隐马尔可夫回归的动态软测量建模方法[J]. 化工学报, 2023, 74(6): 2495-2502. |
| [4] | 苏晓丹, 朱干宇, 李会泉, 郑光明, 孟子衡, 李防, 杨云瑞, 习本军, 崔玉. 湿法磷酸半水工艺考察与石膏结晶过程研究[J]. 化工学报, 2023, 74(4): 1805-1817. |
| [5] | 张中秋, 李宏光, 石逸林. 基于人工预测调控策略的复杂化工过程多任务学习方法[J]. 化工学报, 2023, 74(3): 1195-1204. |
| [6] | 张江淮, 赵众. 碳三加氢装置鲁棒最小协方差约束控制及应用[J]. 化工学报, 2023, 74(3): 1216-1227. |
| [7] | 周乐, 沈程凯, 吴超, 侯北平, 宋执环. 深度融合特征提取网络及其在化工过程软测量中的应用[J]. 化工学报, 2022, 73(7): 3156-3165. |
| [8] | 王琨, 侍洪波, 谭帅, 宋冰, 陶阳. 局部时差约束邻域保持嵌入算法在故障检测中的应用[J]. 化工学报, 2022, 73(7): 3109-3119. |
| [9] | 赵涛岩, 曹江涛, 李平, 冯琳, 商瑀. 区间二型模糊免疫PID在环己烷无催化氧化温度控制系统中的应用[J]. 化工学报, 2022, 73(7): 3166-3173. |
| [10] | 王建松, 许锋, 罗雄麟. 化工过程多回路PID控制系统模式切换参数自整定[J]. 化工学报, 2022, 73(4): 1647-1657. |
| [11] | 高欢, 丁国良, 周发贤, 庄大伟. R410A制冷剂在润滑油中的动态析出特性的研究[J]. 化工学报, 2022, 73(3): 1054-1062. |
| [12] | 张兴硕, 罗雄麟, 许锋. 催化裂化装置反再系统动态模拟精细化与控制系统“工艺优先”配对设计[J]. 化工学报, 2022, 73(2): 747-758. |
| [13] | 张成, 潘立志, 李元. 基于加权统计特征KICA的故障检测与诊断方法[J]. 化工学报, 2022, 73(2): 827-837. |
| [14] | 卢道铭, 唐钊艇, 范怡平, 卢春喜. 大差异颗粒分级再生设备的性能研究[J]. 化工学报, 2021, 72(8): 4184-4195. |
| [15] | 石珊珊, 魏爱博, 张小斌. 液氮超声空化CFD模拟及实验研究[J]. 化工学报, 2021, 72(4): 1930-1938. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备 11010102001995号
京公网安备 11010102001995号

